Chuyên đề Tin học 10 Bài 4 (Cánh diều): Thực hành: Lắp ráp các bộ phận của Robot giáo dục
Với giải bài tập Chuyên đề Tin học 10 Bài 4: Thực hành: Lắp ráp các bộ phận của Robot giáo dục sách Cánh diều hay nhất, chi tiết giúp học sinh dễ dàng làm bài tập Chuyên đề học tập Tin học 10 CD Bài 4.
Giải bài tập Chuyên đề Tin học 10 Bài 4: Thực hành: Lắp ráp các bộ phận của Robot giáo dục
Khởi động trang 20 Chuyên đề Tin học 10: Em đã biết, robot được cấu tạo từ nhiều bộ phận, linh kiện, phụ kiện. Làm thế nào để lắp ráp hoàn chỉnh một bộ robot chính xác và nhanh nhất?
Trả lời:
Robot được cấu tạo từ nhiều bộ phận, linh kiện, phụ kiện. Để lắp ráp hoàn chỉnh một bộ robot chính xác và nhanh nhất ta phải chuẩn bị các linh kiện, phụ kiện đầy đủ, sau đó tiến hành lắp ráp theo nguyên lý.
Bài 1 trang 20 Chuyên đề Tin học 10: Chuẩn bị các linh kiện, phụ kiện
Trả lời:
a. Chuẩn bị: Chuẩn bị theo bảng sau.


b. Tiến hành
Bước 1. Sắp xếp các linh kiện, phụ kiện gọn gàng như Hình 1
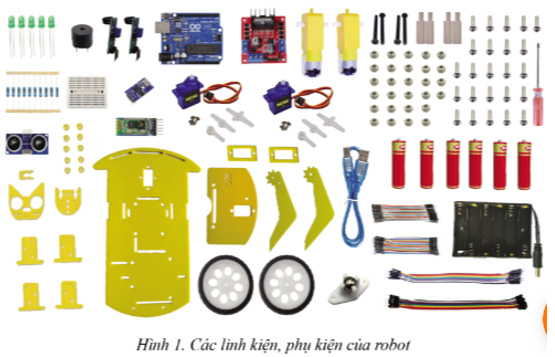
Bước 2. Kiểm tra các linh kiện, phụ kiện đúng và đủ danh sách ở trên.
Bài 2 trang 22 Chuyên đề Tin học 10: Lắp ráp robot
Trả lời:
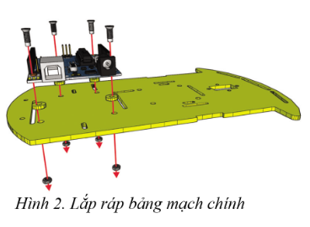
Chú ý: Đường màu đỏ thể hiện vị trí lắp ráp các bộ phận.
1. Lắp ráp bảng mạch chính:
* Chuẩn bị:
- 1 khung cơ khí
- 1 mạch Arduino
- 4 bộ bu lông, đai ốc M3 × 12mm
- 4 vòng đệm.
* Tiến hành: Lắp ráp như mô tả Hình 2.
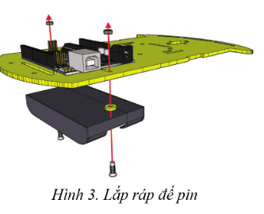
2. Lắp ráp để pin
* Chuẩn bị
- 1 đế pin AA 6 viên
- 2 bộ bu lông, đai ốc M3 × 12 mm
- 2 vòng đệm
* Tiến hành: Lắp ráp như mô tả ở Hình 3
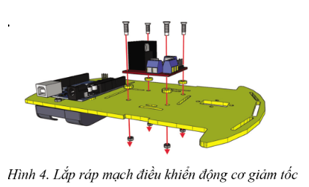
3. Lắp ráp mạch điều khiển động cơ
* Chuẩn bị
- 1 mạch điều khiển động cơ
- 4 bộ bu lông, đai ốc M3 x 12 mm
- 4 vòng đệm
* Tiến hành: Lắp ráp như mô tả Hình 4
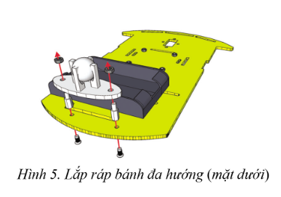
4. Lắp ráp bánh đa hướng
* Chuẩn bị
- 1 bánh đa hướng
- 2 bộ bu lông, đai ốc M3 × 12 mm
- 2 cọc nhựa
* Tiến hành
Lắp ráp như mô tả Hình 5
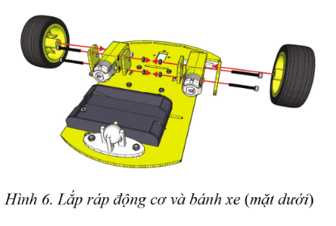
5. Lắp ráp động cơ và bánh xe
* Chuẩn bị
- 2 động cơ giảm tốc
- 2 bánh xe
- 4 bộ bu lông, đai ốc M3 × 30 mm
- 4 giá giữ động cơ
* Tiến hành: Lắp ráp như mô tả ở Hình 6
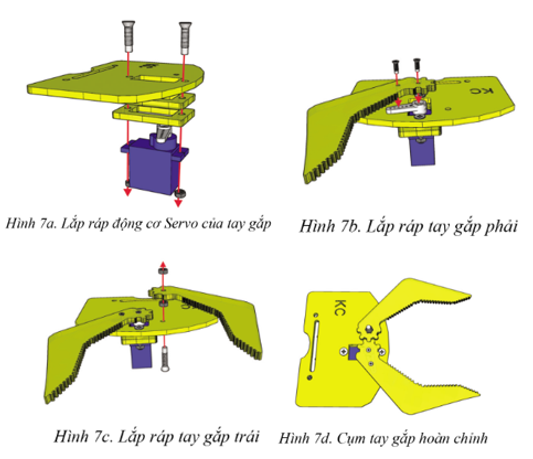
6. Lắp ráp cụm tay gắp
* Chuẩn bị
- 1 khung tay gắp
- 1 bộ động cơ Servo (đã kèm vít)
- 3 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hàng: Lắp ráp như mô tả ở Hình 7a, 7b, 7c, 7d
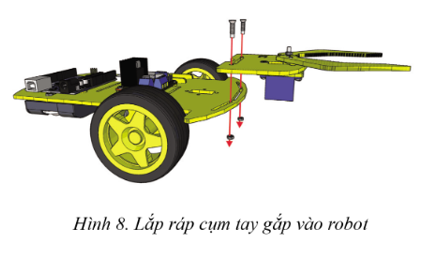
7. Lắp ráp cụm tay gắp vào robot
*Chuẩn bị
- Khung robot đã lắp ráp
- Một cụm tay gắp
- 2 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hành: Lắp ráp theo mô tả ở Hình 8
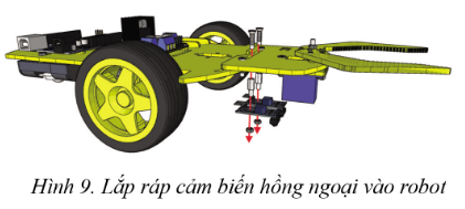
8. Lắp ráp cảm biến hồng ngoại vào robot
* Chuẩn bị
- 2 mạch cảm biến hồng ngoại
- 2 cọc nhựa
- 2 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hành: Lắp ráp theo mô tả Hình 9
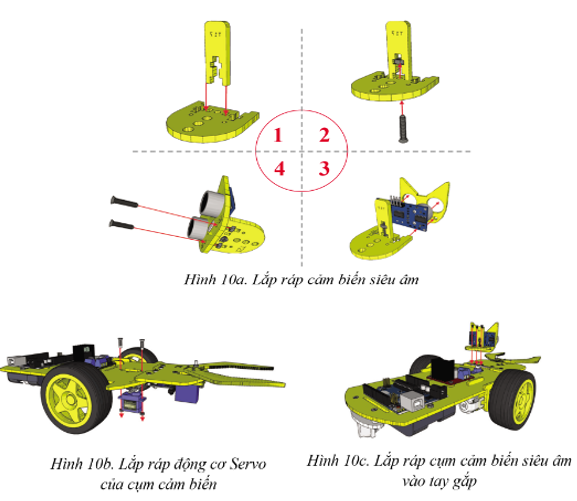
9. Lắp ráp cụm cảm biến siêu âm cho robot
* Chuẩn bị
- 1 bộ động cơ Servo (đã kèm vít)
- 3 bộ bu lông, đai ốc M3 × 12 mm
- Giá đỡ cảm biến siêu âm
- Cảm biến siêu âm
* Tiến hành: Lăp ráp theo mô tả Hình 10a, 10b, 10c
10. Kết nối mạch điện cho robot
* Chuẩn bị:
- 1 mạch Arduino
- 1 mạch điều khiển động cơ L298
- 2 động cơ giảm tốc
- 1 động cơ servo
- 1 cảm biến siêu âm
- 1 Breadboard
- 1 nguồn 9v
- 8 dây jum kết nối đực cái 20cm
- 7 dây jum kết nối đực đực 20cm
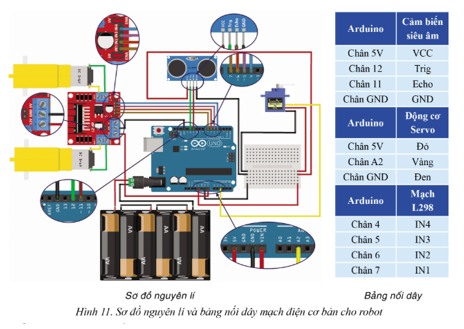
b. Tiến hành: kết nối các bộ phận điện, điện tử theo sơ đồ nguyên lý và bảng nối dây ở Hình 11.
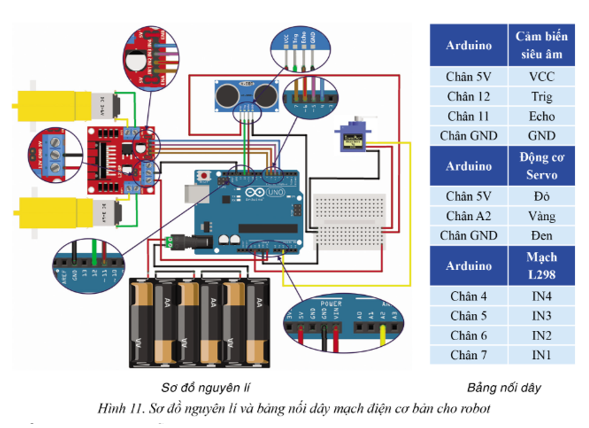
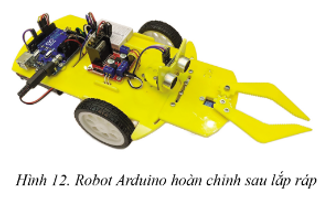
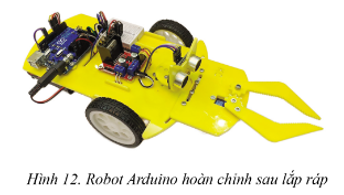
Kiểm tra tình trạng sẵn sàng hoạt động của robot Arduino sau khi lắp ráp (Hình 12) bằng cách: Tháo các chân jum kết nối tại chân 4, 5, 6, 7 của bảng mạch Arduino (hình 11) và kết nối các chân này vào Breadboard, sao cho chân IN1, IN3 của L298 được cấp nguồn 0V (GND) và chân IN2, IN4 của chân L298 được cấp nguồn 5V. Nếu robot đã di chuyển tiến lên thì robot đã sẵn sàng hoạt động.
Vận dụng trang 25 Chuyên đề Tin học 10: Sử dụng robot Hình 12 thay đổi kết nối chân của mạch điều khiển động cơ L298 với mạch Arduino để robot di chuyển tiến, tương tự, để robot di chuyển lùi, quay trái, quay phải. Biết chân từ 0 đến 9 của Arduino khi chưa có chương trình mặc định sẽ không xác định được mức điện áp. Có thể sử dụng các chân 5V, GND của mạch Arduino để cấp mức điện áp xác định cho các chân IN1, IN2, IN3, IN4 của mạch L298.
Trả lời:
Kết nối theo sơ đồ nguyên lý và bảng nối dây sau:
- Kết nối chân 5V với IN3, IN4.
- Bỏ kết nối chân 5V với hai chân IN3, IN4. Kết nối chân GND với cả 2 chân IN3 và IN4.
- Bỏ kết nối chân 5V với chân IN3, sau đó kết nối chân 5V với IN4.
Xem thêm lời giải bài tập Chuyên đề Tin học lớp 10 Cánh diều hay, chi tiết khác:
Bài 3: Thực hành: Kiểm tra các bộ phận của robot giáo dục
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Cánh Diều
- Tác giả tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Tóm tắt tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Bố cục tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Soạn văn lớp 10 (ngắn nhất) – Cánh Diều
- Giải sbt Ngữ văn lớp 10 – Cánh Diều
- Văn mẫu lớp 10 – Cánh Diều
- Giải Chuyên đề học tập Ngữ văn 10 – Cánh diều
- Giải sgk Toán 10 – Cánh Diều
- Giải Chuyên đề Toán 10 – Cánh Diều
- Lý thuyết Toán 10 – Cánh Diều
- Giải sbt Toán 10 – Cánh Diều
- Chuyên đề dạy thêm Toán 10 Cánh diều (2024 có đáp án)
- Giải sgk Tiếng Anh 10 – Explore new worlds
- Giải sgk Tiếng Anh 10 – ilearn Smart World
- Trọn bộ Từ vựng Tiếng Anh 10 ilearn Smart World đầy đủ nhất
- Ngữ pháp Tiếng Anh 10 i-learn Smart World
- Giải sbt Tiếng Anh 10 - iLearn Smart World
- Giải sgk Vật lí 10 – Cánh Diều
- Giải sbt Vật lí 10 – Cánh Diều
- Lý thuyết Vật lí 10 – Cánh Diều
- Giải Chuyên đề Vật lí 10 – Cánh Diều
- Giải sgk Hóa học 10 – Cánh Diều
- Lý thuyết Hóa học 10 – Cánh Diều
- Giải sbt Hóa học 10 – Cánh Diều
- Giải Chuyên đề Hóa học 10 – Cánh Diều
- Giải sgk Sinh học 10 – Cánh Diều
- Giải sbt Sinh học 10 – Cánh Diều
- Lý thuyết Sinh học 10 – Cánh Diều
- Giải Chuyên đề Sinh học 10 – Cánh diều
- Giải sgk Lịch sử 10 – Cánh Diều
- Giải sbt Lịch sử 10 – Cánh Diều
- Giải Chuyên đề Lịch sử 10 – Cánh Diều
- Lý thuyết Lịch sử 10 – Cánh diều
- Giải sgk Địa lí 10 – Cánh Diều
- Lý thuyết Địa Lí 10 – Cánh Diều
- Giải sbt Địa lí 10 – Cánh Diều
- Giải Chuyên đề Địa lí 10 – Cánh Diều
- Lý thuyết Công nghệ 10 – Cánh Diều
- Giải sgk Công nghệ 10 – Cánh Diều
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải Chuyên đề Kinh tế pháp luật 10 – Cánh diều
- Lý thuyết KTPL 10 – Cánh diều
- Lý thuyết Giáo dục quốc phòng 10 – Cánh Diều
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Cánh diều
- Giải sbt Giáo dục quốc phòng - an ninh 10 – Cánh Diều
- Giải sgk Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sbt Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sgk Giáo dục thể chất 10 – Cánh Diều