Chuyên đề Tin học 10 Bài 1 (Cánh diều): Kết nối robot giáo dục với máy tính
Với giải bài tập Chuyên đề Tin học 10 Bài 1: Kết nối robot giáo dục với máy tính sách Cánh diều hay nhất, chi tiết giúp học sinh dễ dàng làm bài tập Chuyên đề học tập Tin học 10 CD Bài 1.
Giải bài tập Chuyên đề Tin học 10 Bài 1: Kết nối robot giáo dục với máy tính
Khởi động trang 26 Chuyên đề Tin học 10: Các thiết bị kết nối với nhau qua các kênh truyền thông để trao đổi thông tin. Em hãy kể tên một số thiết bị:
Trả lời:
1) Sử dụng kết nối USB: máy tính, điện thoại thông minh
2) Sử dụng kết nối Bluetooth: máy tính bảng, điện thoại thông minh
3) Sử dụng kết nối wifi: máy tính bảng, điện thoại thông minh, máy tính.
1. Các kênh truyền thông giữa robot và máy tính
2. Phần mềm kết nối robot giáo dục với máy tính
Hoạt động 1 trang 29 Chuyên đề Tin học 10: Bài thực hành cài đặt phần mềm kết nối robot với máy tính
Trả lời:
a. Chuẩn bị
Máy tính đã cài một trong các hệ điều hành: Windows 7 hoặc mới hơn, Mac OS X 10.10 hoặc lớn hơn, Linux (Ubuntu 18 hoặc mới hơn)
b. Tiến hành
Bước 1. Tải phần mềm
Vào địa chỉ: https://www.hoc10.vn/download/tinhoc10 để tải phần mềm EasyCode phiên bản 4.0.2 (Phiên bản dành cho cộng đồng) (Hình 6)

Bước 2. Cài đặt phần mềm
Mở file cài đặt để tiến hành cài đặt phần mềm EasyCode. Thực hiện các bước theo hướng dẫn cho đến khi cài xong phần mềm.
Bước 3. Cài đặt driver
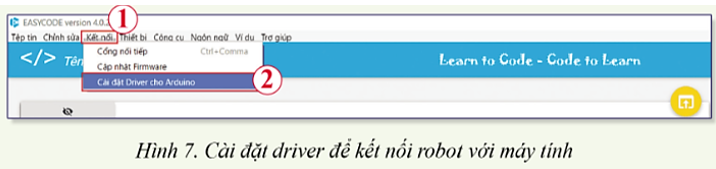
Khởi động phần mềm EasyCode
- Trên Thanh bảng chọn, chọn Kết nối (1), sau đó chọn Cài đặt Driver cho Arduino (2) (Hình 7)
- Khi cửa sổ cài đặt hiện lên, chọn Install để cài đặt (Hình 8)
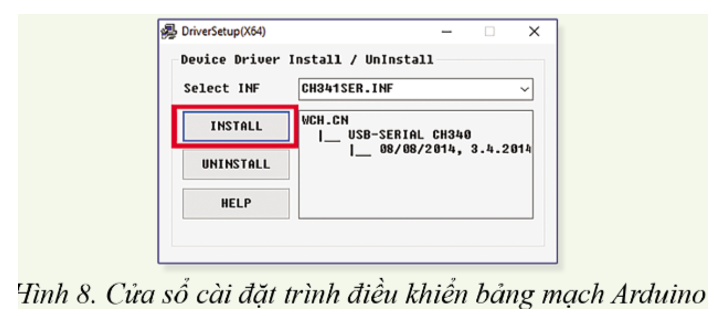
- Khi thấy thông báo thành công thì chọn OK để kết thúc.
c) Xử lý lỗi
- Nếu không cài đặt được phần mềm thì khởi động lại máy tính và tiến hành cài đặt lại.
- Sau khi khởi động phần mềm, nếu giao diện bị che một phần thì nhấn tổ hợp Windows (![]() ) + một trong các phím mũi tên
) + một trong các phím mũi tên ![]() cho đến khi có thể quan sát giao diện phần mềm một cách đầy đủ.
cho đến khi có thể quan sát giao diện phần mềm một cách đầy đủ.
3. Kiểm tra kết nối robot với máy tính
Hoạt động 2 trang 31 Chuyên đề Tin học 10: Bài thực hành kiểm tra kết nối robot với máy tính.
Trả lời:
a. Chuẩn bị
- Robot Arduino
- Máy tính đã cài phần mềm EasCode
b. Tiến hành
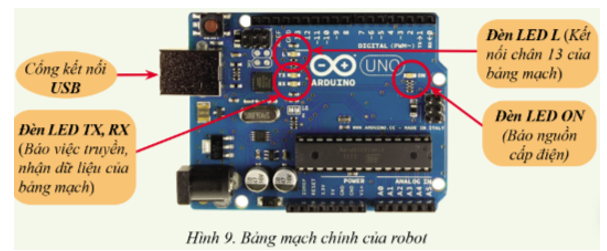
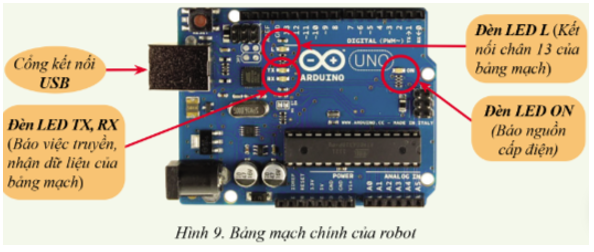
Bước 1. Quan sát bảng mạch chính của robot (Hình 9)
- Xác định vị trí và tên gọi các đèn LED có trên bảng mạch chính.
- Xác định vị trí cổng kết nối USB
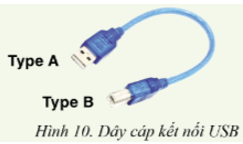
Bước 2. Quan sát dây cáp kết nối (Hình 10)
Bước 3. Kết nối robot với máy tính
Sử dụng dây cáp USB để kết nối robot với máy tính. Khi đó đèn LED ON sẽ sáng để báo hiệu bảng mạch Arduino đã được cấp nguồn điện. Đồng thời, máy tính cũng phát ra âm thanh để thông báo có kết nối phần cứng (robot) mới.
Bước 4. Kiểm tra kết nối cổng nối tiếp
- Khởi động phần mềm EasyCode
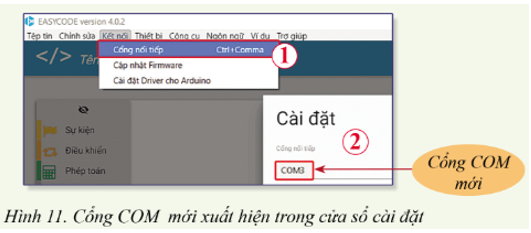
- Trên Thanh bảng chọn, chọn Kết nối, chọn Cổng nối tiếp (1). Khi đó giao diện Cài đặt (2) sẽ xuất hiện (Hình 11)
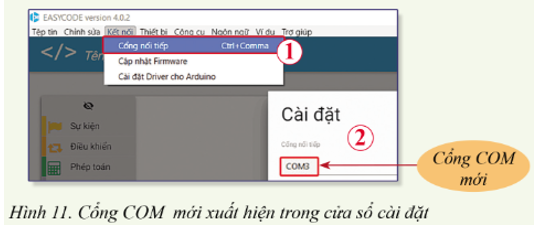
- Trong cửa sổ cài đặt, nếu thấy xuất hiện một cổng COM mới (đây là cổng COM ảo được máy tính tự gán số thứ tự) thì việc kết nối đã thành công (Hình 11)
Với các thiết bị sử dụng giao thức truyền thông nối tiếp để kết nối với máy tính thông qua cổng USB, khi kết nối, máy tính sẽ tạo ra một cổng COM ảo tương ứng để thực hiện việc truyền tin.
Bước 5. Kiểm tra việc nạp chương trình vào robot
- Trên thanh bảng chọn, chọn mục Ví dụ, chọn Arduino, chọn Điều khiển đèn LED (1)
- Đưa chuột đến trị trí Nút biên dịch và nạp chương trình, chọn ![]() (2) để nạp chương trình vào robot (Hình 12)
(2) để nạp chương trình vào robot (Hình 12)
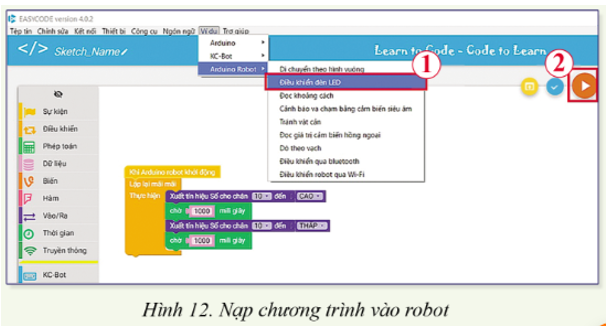
- Quan sát nếu thấy đèn LED L nhấp nháy thì chương trình đã nạp thành công vào robot.
c. Xử lý lỗi
- Nếu robot chưa kết nối được với máy tính thì cần cài đặt lại driver
- Nếu nạp chương trình không thành công thì tiến hành ngắt kết nối giữa robot và máy tính, rồi thực hiện lại thao tác nạp chương trình từ đầu.
Luyện tập trang 33 Chuyên đề Tin học 10: Em hãy thực hiện quá trình kết nối với máy tính thông qua cổng USB. Quan sát và ghi lại các phản ứng của robot và máy tính khi thực hiện thao tác kết nối.
Trả lời:
* Các thao tác kết nối:
a. Chuẩn bị
- Robot Arduino
- Máy tính đã cài phần mềm EasCode
b. Tiến hành
Bước 1. Quan sát bảng mạch chính của robot (Hình 9)
- Xác định vị trí và tên gọi các đèn LED có trên bảng mạch chính.
- Xác định vị trí cổng kết nối USB
Bước 2. Quan sát dây cáp kết nối (Hình 10)

Bước 3. Kết nối robot với máy tính
Sử dụng dây cáp USB để kết nối robot với máy tính. Khi đó đèn LED ON sẽ sáng để báo hiệu bảng mạch Arduino đã được cấp nguồn điện. Đồng thời, máy tính cũng phát ra âm thanh để thông báo có kết nối phần cứng (robot) mới.
Bước 4. Kiểm tra kết nối cổng nối tiếp
- Khởi động phần mềm EasyCode
- Trên Thanh bảng chọn, chọn Kết nối, chọn Cổng nối tiếp (1). Khi đó giao diện Cài đặt (2) sẽ xuất hiện (Hình 11)
- Trong cửa sổ cài đặt, nếu thấy xuất hiện một cổng COM mới (đây là cổng COM ảo được máy tính tự gán số thứ tự) thì việc kết nối đã thành công (Hình 11)
Với các thiết bị sử dụng giao thức truyền thông nối tiếp để kết nối với máy tính thông qua cổng USB, khi kết nối, máy tính sẽ tạo ra một cổng COM ảo tương ứng để thực hiện việc truyền tin.
Bước 5. Kiểm tra việc nạp chương trình vào robot
- Trên thanh bảng chọn, chọn mục Ví dụ, chọn Arduino, chọn Điều khiển đèn LED (1)
- Đưa chuột đến trị trí Nút biên dịch và nạp chương trình, chọn ![]() (2) để nạp chương trình vào robot (Hình 12)
(2) để nạp chương trình vào robot (Hình 12)
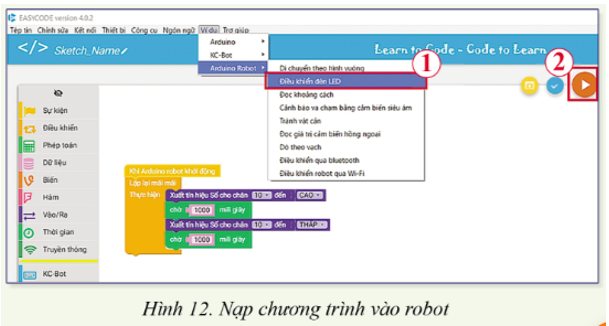
- Quan sát nếu thấy đèn LED L nhấp nháy thì chương trình đã nạp thành công vào robot.
c. Xử lý lỗi
- Nếu robot chưa kết nối được với máy tính thì cần cài đặt lại driver
- Nếu nạp chương trình không thành công thì tiến hành ngắt kết nối giữa robot và máy tính, rồi thực hiện lại thao tác nạp chương trình từ đầu.
* Trong quá trình thực hiện thao tác kết nối, các em hãy quan sát và ghi lại các phản ứng của robot.
Vận dụng trang 33 Chuyên đề Tin học 10: Kết nối robot với máy tính và nạp các chương trình ví dụ sẵn có khác trong bảng chọn Ví dụ (trên thanh bảng chọn của phần mềm EasyCode). Quan sát và mô tả hoạt động của robot với mỗi ví dụ tương ứng.
Trả lời:
Các em tham khảo các bước kết nối robot với máy tính ở Hoạt động 2 trang 31.
Các em hãy nạp các chương ví dụ sẵn trong bảng chọn Ví dụ để quan sát hoạt động của robot.
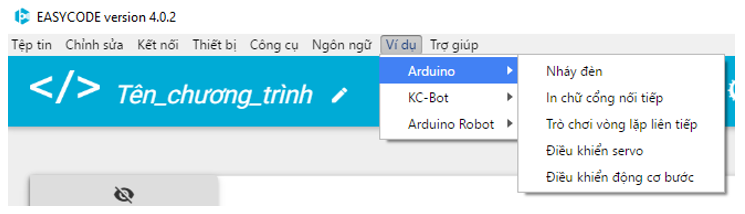
- Arduino
+ Nháy đèn
+ In chữ cổng nối tiếp
+ Trò chơi vòng lặp liên tiếp
+ Điều khiển servo
+ Điều khiển động cơ bước
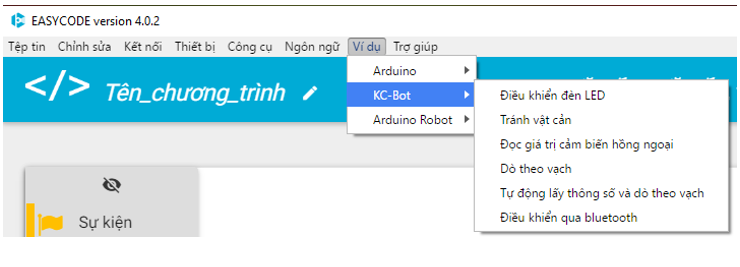
- KC-Bot
+ Điều khiển đèn LED
+ Tránh vật cản
+ Đọc giá trị cảm biến hồng ngoại
+ Dò theo vạch
+ Tự động lấy thông số và dò theo vạch
+ Điều khiển qua bluetooth
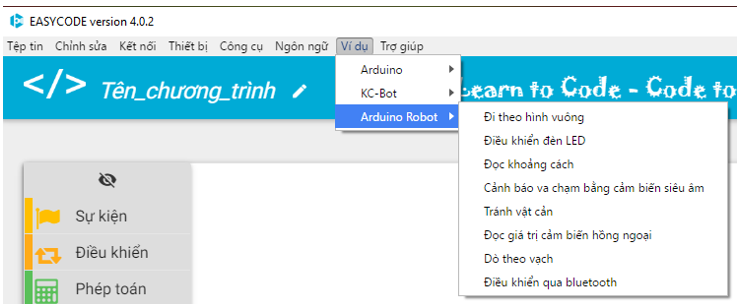
- Arduino Robot
+ Đi theo hình vuông
+ Điều khiển đèn LED
+ Đọc khoảng cách
+ Cảnh báo va chạm bằng cảm biến siêu âm
+ Tránh vật cản
+ Đọc giá trị cảm biến hồng ngoại
+ Dò theo vạch
+ Điều khiển qua bluetooth
Câu 1 trang 33 Chuyên đề Tin học 10: Kết nối USB là kết nối có dây cáp hay không dây?
Trả lời:
Kết nối USB là kết nối có dây cáp.
Câu 2 trang 33 Chuyên đề Tin học 10: Để robot kết nối và truyền hoặc nhận được thông tin với máy tính, ta cần cài đặt phần mềm gì cho máy tính?
Trả lời:
Để robot kết nối và truyền hoặc nhận được thông tin với máy tính, ta cần cài đặt phần mềm trình điều khiển (driver). Các hãng sản xuất robot thường cung cấp phần mềm này riêng lẻ hoặc tích hợp kèm trong một bộ công cụ phần mềm hỗ trợ toàn diện việc phát triển ứng dụng cho robot. Bộ công cụ này được gọi chung là phần mềm môi trường phát triển tích hợp (IDE).
Xem thêm lời giải bài tập Chuyên đề Tin học lớp 10 Cánh diều hay, chi tiết khác:
Bài 2: Kết nối robot giáo dục qua các kênh truyền thông
Bài 3: Thực hành kết nối và nạp chương trình cho robot giáo dục
Bài 4: Thực hành kết nối và kiểm tra các thiết bị ngoại vi
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Cánh Diều
- Tác giả tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Tóm tắt tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Bố cục tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Soạn văn lớp 10 (ngắn nhất) – Cánh Diều
- Giải sbt Ngữ văn lớp 10 – Cánh Diều
- Văn mẫu lớp 10 – Cánh Diều
- Giải Chuyên đề học tập Ngữ văn 10 – Cánh diều
- Giải sgk Toán 10 – Cánh Diều
- Giải Chuyên đề Toán 10 – Cánh Diều
- Lý thuyết Toán 10 – Cánh Diều
- Giải sbt Toán 10 – Cánh Diều
- Chuyên đề dạy thêm Toán 10 Cánh diều (2024 có đáp án)
- Giải sgk Tiếng Anh 10 – Explore new worlds
- Giải sgk Tiếng Anh 10 – ilearn Smart World
- Trọn bộ Từ vựng Tiếng Anh 10 ilearn Smart World đầy đủ nhất
- Ngữ pháp Tiếng Anh 10 i-learn Smart World
- Giải sbt Tiếng Anh 10 - iLearn Smart World
- Giải sgk Vật lí 10 – Cánh Diều
- Giải sbt Vật lí 10 – Cánh Diều
- Lý thuyết Vật lí 10 – Cánh Diều
- Giải Chuyên đề Vật lí 10 – Cánh Diều
- Giải sgk Hóa học 10 – Cánh Diều
- Lý thuyết Hóa học 10 – Cánh Diều
- Giải sbt Hóa học 10 – Cánh Diều
- Giải Chuyên đề Hóa học 10 – Cánh Diều
- Giải sgk Sinh học 10 – Cánh Diều
- Giải sbt Sinh học 10 – Cánh Diều
- Lý thuyết Sinh học 10 – Cánh Diều
- Giải Chuyên đề Sinh học 10 – Cánh diều
- Giải sgk Lịch sử 10 – Cánh Diều
- Giải sbt Lịch sử 10 – Cánh Diều
- Giải Chuyên đề Lịch sử 10 – Cánh Diều
- Lý thuyết Lịch sử 10 – Cánh diều
- Giải sgk Địa lí 10 – Cánh Diều
- Lý thuyết Địa Lí 10 – Cánh Diều
- Giải sbt Địa lí 10 – Cánh Diều
- Giải Chuyên đề Địa lí 10 – Cánh Diều
- Lý thuyết Công nghệ 10 – Cánh Diều
- Giải sgk Công nghệ 10 – Cánh Diều
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải Chuyên đề Kinh tế pháp luật 10 – Cánh diều
- Lý thuyết KTPL 10 – Cánh diều
- Lý thuyết Giáo dục quốc phòng 10 – Cánh Diều
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Cánh diều
- Giải sbt Giáo dục quốc phòng - an ninh 10 – Cánh Diều
- Giải sgk Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sbt Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sgk Giáo dục thể chất 10 – Cánh Diều