Chuyên đề Tin học 10 Bài 3 (Cánh diều): Thực hành: Kiểm tra các bộ phận của robot giáo dục
Với giải bài tập Chuyên đề Tin học 10 Bài 3: Thực hành: Kiểm tra các bộ phận của robot giáo dục sách Cánh diều hay nhất, chi tiết giúp học sinh dễ dàng làm bài tập Chuyên đề học tập Tin học 10 CD Bài 3.
Giải bài tập Chuyên đề Tin học 10 Bài 3: Thực hành: Kiểm tra các bộ phận của robot giáo dục
Khởi động trang 16 Chuyên đề Tin học 10: Theo em, nguồn điện ảnh hưởng như thế nào đến các thiết bị điện, điện tử của robot?
Trả lời:
Nếu nguồn điện không đủ cho các thiết bị điện, điện tử của robot thì robot có thể sẽ không hoạt động, hoặc hoạt động chập chờn, không chính xác. Với đèn LED, nếu nguồn điện không đủ sẽ thì đèn LED sẽ không sáng.
Bài 1 trang 16 Chuyên đề Tin học 10: Kiểm tra đèn LED.
Trả lời:
a. Chuẩn bị:
- 1 đèn LED.
- 1 nguồn điện một chiều có điện áp 3V (mắc nối tiếp 2 viên pin AA 1,5V hoặc cấp nguồn điện khác).
b. Tiến hành
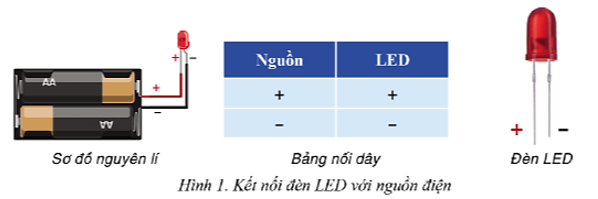
Bước 1. Quan sát, xác định các chân của đèn LED. Chân dương dài, gắn với bản cực nhỏ. Chân âm ngắn, gắn với bản cực to.
Bước 2. Kết nối mạch theo bảng nối dây (Hình 1)
Bước 3. Quan sát đèn LED và cho biết hiện tượng.
Bước 4. Đảo chiều nguồn cấp điện, quan sát và cho biết hiện tượng.
Bước 5. Sử dụng nguồn điện áp 1.5V để cấp điện cho đèn LED (lưu ý đúng cực), quan sát và cho biết hiện tượng.
c. Xử lý lỗi:
Trường hợp đèn LED không sáng, kiểm tra các khả năng sau.
- Cấp nguồn cho đèn LED đã đúng cực chưa? Nếu chưa đúng thì đổi lại cực.
- Nguồn điện có bị yếu không? Nếu nguồn điện yếu, cần thay đổi nguồn điện mới.
- Nếu thử tất cả các khả năng trên mà đèn LED vẫn không sáng thì đèn LED đã hỏng, cần thay thế đèn LED mới.
Đèn LED có chân âm và chân dương. Chúng ta cần lắp nguồn đúng với cực và đủ công suất để đèn LED sáng.
Bài 2 trang 17 Chuyên đề Tin học 10: Kiểm tra còi chip.
Trả lời:
a. Chuẩn bị
- 1 còi chip.
- 1 nguồn điện một chiều có điện áp 3V.
b. Tiến hành
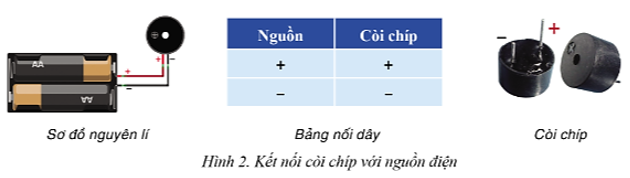
Bước 1. Quan sát còi chip, phân biệt: chân âm (-) ngắn, chân dương (+) dài.
(Chú ý: Có dấu (+) ở mặt trên còi chip để nhận biết chân dương)
Bước 2. Kết nối mạch theo bảng nối dây (Hình 2)
Bước 3. Lắng nghe còi chíp và cho biết hiện tượng.
c. Xử lý
Trường hợp còi chip không kêu, kiểm tra các khả năng sau:
- Cấp nguồn cho còi chip đã đúng cực chưa? Nếu chưa đúng thì đổi lại cực.
- Nguồn điện có bị yếu không? Nếu nguồn điện yếu, cần thay nguồn điện mới.
- Nếu thử tất cả các khả năng trên mà còi chip vẫn không kêu thì còi chip đã hỏng, cần thay thế còi chip mới.
Còi chip có chân âm và chân dương. Để còi chip kêu, chúng ta cần cấp nguồn điện đúng cực. Nếu cấp nguồn điện không đủ công suất thì còi chip sẽ không kêu.
Bài 3 trang 17 Chuyên đề Tin học 10: Kiểm tra động cơ giảm tốc.
Trả lời:
a. Chuẩn bị
- 1 động cơ giảm tốc.
- 1 nguồn điện một chiệu 3V-9V
b. Tiến hành
Bước 1. Quan sát động cơ giảm tốc, xác định các chân cấp nguồn của động cơ giảm tốc.
Bước 2. Kết nối mạch theo bảng nối dây (Hình 3)

Bước 3. Quan sát chiều quay của trục động cơ giảm tốc.
Bước 4. Đảo chiều nguồn cấp cho động cơ giảm tốc, quan sát và nhận xét về chiều quay của trục động cơ.
c. Xử lý lỗi
Trường hợp động cơ giảm tốc không quay, kiểm tra các khả năng sau:
- Kiểm tra các mối tiếp xúc và dây nối có bị hở hay đứt không? Nếu có thì nối phần bị hở đứt.
- Nguồn điện có bị yếu không? Nếu nguồn điện yếu, cần thay nguồn điện mới.
- Nếu đã khắc phục hai lỗi trên mà động cơ giảm tốc vẫn không quay thì động cơ giảm tốc hỏng, cần thay thế động cơ mới.
Động cơ giảm tốc không phân biệt chân âm, dương. Khi đảo chiều nguồn điện cấp cho động cơ giảm tốc, trục động cơ sẽ quay theo chiều ngược lại.
Bài 4 trang 18 Chuyên đề Tin học 10: Kiểm tra mạch điều khiển động cơ giảm tốc.
Trả lời:
a. Chuẩn bị
- 1 mạch điều khiển động cơ loại L298.
- 1 động cơ giảm tốc
- 1 nguồn 5V-9V
b. Tiến hành
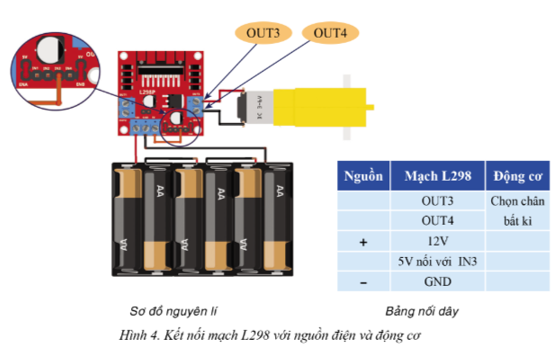
Bước 2. Quan sát mạch L298. Xác định các chân IN1, IN2, IN3, IN4, 12V, GND, 5V và tên chúng được ghi trên mạch.
Bước 2. Kết nối mạch theo bảng dây nối (Hình 4)
Bước 3. Quan sát chiều quay của trục động cơ
Bước 4. Bỏ kết nối chân 5V với chân IN3, sau đó kết nối chân 5V với chân IN4. Quan sát và nhận xét chiều quay của trục động cơ.
Bước 5. Kết nối chân 5V với 2 chân IN3 và IN4. Quan sát động cơ và nhận xét.
Bước 6. Bỏ kết nối chân 5V với hai chân IN3 và IN4. Kết nối chân GND với cả hai chân IN3 và IN4. Quan sát động cơ và nhận xét.
c. Xử lý lỗi
Trường hợp động cơ không quay, ta cần kiểm tra để đảm bảo:
- Đã cấp nguồn cho mạch L298 đúng cực qua các chân 5V, GND.
- Đã kết nối mạch L298 với động cơ qua các chân OUT3, OUT 4.
- Đã sử dụng đúng chân IN3 hoặc IN4 để cấp tín hiệu điều khiển cho động cơ giảm tốc.
Mạch điều khiển động cơ giảm tốc, giúp tăng công suất điện cấp cho động cơ. Thông qua mạch điều khiển động cơ, có thể điều khiển nhiều động cơ và cả chiều quay của chúng.
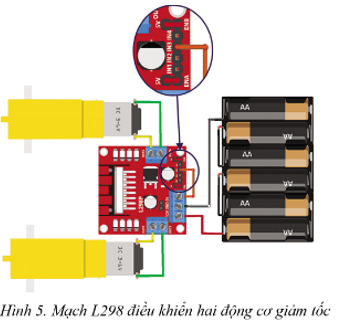
Vận dụng trang 19 Chuyên đề Tin học 10: Em hãy kết nối mạch L298 (Hình 5) để điều khiển hai động cơ giảm tốc và thực hiện các công việc sau đây:
Trả lời:
a. Thiết lập bảng nối dây:
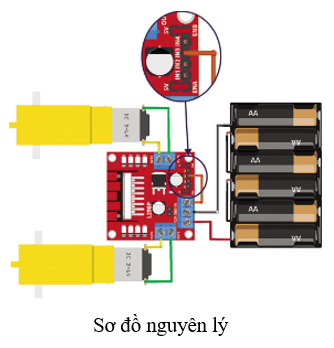
Bảng nối dây:
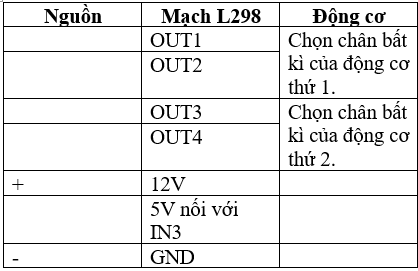
b. Thiết lập các cặp đầu vào IN1, IN2, IN3, IN4 để hai động cơ giảm tốc: quay cùng chiều, quay ngược chiều, cùng dừng lại:
- Kết nối chân 5V với IN3, IN4.
- Bỏ kết nối chân 5V với hai chân IN3, IN4. Kết nối chân GND với cả 2 chân IN3 và IN4.
- Bỏ kết nối chân 5V với chân IN3, sau đó kết nối chân 5V với IN4.
Xem thêm lời giải bài tập Chuyên đề Tin học lớp 10 Cánh diều hay, chi tiết khác:
Bài 4: Thực hành: Lắp ráp các bộ phận của Robot giáo dục
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Cánh Diều
- Tác giả tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Tóm tắt tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Bố cục tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Soạn văn lớp 10 (ngắn nhất) – Cánh Diều
- Giải sbt Ngữ văn lớp 10 – Cánh Diều
- Văn mẫu lớp 10 – Cánh Diều
- Giải Chuyên đề học tập Ngữ văn 10 – Cánh diều
- Giải sgk Toán 10 – Cánh Diều
- Giải Chuyên đề Toán 10 – Cánh Diều
- Lý thuyết Toán 10 – Cánh Diều
- Giải sbt Toán 10 – Cánh Diều
- Chuyên đề dạy thêm Toán 10 Cánh diều (2024 có đáp án)
- Giải sgk Tiếng Anh 10 – Explore new worlds
- Giải sgk Tiếng Anh 10 – ilearn Smart World
- Trọn bộ Từ vựng Tiếng Anh 10 ilearn Smart World đầy đủ nhất
- Ngữ pháp Tiếng Anh 10 i-learn Smart World
- Giải sbt Tiếng Anh 10 - iLearn Smart World
- Giải sgk Vật lí 10 – Cánh Diều
- Giải sbt Vật lí 10 – Cánh Diều
- Lý thuyết Vật lí 10 – Cánh Diều
- Giải Chuyên đề Vật lí 10 – Cánh Diều
- Giải sgk Hóa học 10 – Cánh Diều
- Lý thuyết Hóa học 10 – Cánh Diều
- Giải sbt Hóa học 10 – Cánh Diều
- Giải Chuyên đề Hóa học 10 – Cánh Diều
- Giải sgk Sinh học 10 – Cánh Diều
- Giải sbt Sinh học 10 – Cánh Diều
- Lý thuyết Sinh học 10 – Cánh Diều
- Giải Chuyên đề Sinh học 10 – Cánh diều
- Giải sgk Lịch sử 10 – Cánh Diều
- Giải sbt Lịch sử 10 – Cánh Diều
- Giải Chuyên đề Lịch sử 10 – Cánh Diều
- Lý thuyết Lịch sử 10 – Cánh diều
- Giải sgk Địa lí 10 – Cánh Diều
- Lý thuyết Địa Lí 10 – Cánh Diều
- Giải sbt Địa lí 10 – Cánh Diều
- Giải Chuyên đề Địa lí 10 – Cánh Diều
- Lý thuyết Công nghệ 10 – Cánh Diều
- Giải sgk Công nghệ 10 – Cánh Diều
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải Chuyên đề Kinh tế pháp luật 10 – Cánh diều
- Lý thuyết KTPL 10 – Cánh diều
- Lý thuyết Giáo dục quốc phòng 10 – Cánh Diều
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Cánh diều
- Giải sbt Giáo dục quốc phòng - an ninh 10 – Cánh Diều
- Giải sgk Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sbt Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sgk Giáo dục thể chất 10 – Cánh Diều