Chuyên đề Tin học 10 Bài 9 (Kết nối tri thức): Điều khiển robot chuyển động
Với giải bài tập Chuyên đề Tin học 10 Bài 9: Điều khiển robot chuyển động sách Kết nối tri thức hay nhất, chi tiết giúp học sinh dễ dàng làm bài tập Chuyên đề học tập Tin học 10 KNTT Bài 9.
Giải bài tập Chuyên đề Tin học 10 Bài 9: Điều khiển robot chuyển động
Khởi động trang 38 Chuyên đề Tin học 10: Các em đã từng được quan sát robot chuyển động chưa? Làm thế nào để robot có thể chuyển động được? Trong các nhà máy, người ta sử dụng cánh tay robot để thực hiện 1 số công đoạn sản xuất thay con người. Cơ chế chế điều khiển cánh tay robot là gì?
Trả lời:
Em đã từng được quan sát robot chuyển động. Muốn robot chuyển động được thì phải viết chương trình điều khiển robot chuyển động, sau đó cùng với sự điều khiển của con người thông qua các thiết bị thì robot có thể chuyển động được.
Trong nhà máy người ta sử dụng cánh tay robot để thực hiện 1 số công đoạn sản xuất thay con người. Cơ chế hoạt động của chúng dựa trên liên kết giữa bộ điều khiển và các khớp nối chuyển động. Theo đó, bộ phận điều khiển chủ động truyền hiệu lệnh đến các khớp nối cho phép cánh tay chuyển động quay (như trong một robot có khớp nối) hoặc chuyển dịch (tuyến tính).
Các liên kết được thao túng theo nhu cầu sản xuất để tạo thành một chuỗi động học. Điểm cuối của chuỗi hành động này được gọi là hiệu ứng kết thúc và quy luật hoạt động của nó mô phỏng hoàn hảo chuyển động của bàn tay con người.

1. Lập trình điều khiển động cơ DC
Hoạt động 1 trang 38 Chuyên đề Tin học 10: Tìm hiểu các lệnh điều khiển động cơ DC
Đọc, thảo luận để hiểu các lệnh cơ bản điều khiển động cơ DC của robot giáo dục.
Trả lời:
Động cơ DC thường dùng để tạo chuyển động cho các bánh xe của robot. Động cơ DC chỉ có 2 chiều xoay:
(1) Xoay từ trái sang phải theo chiều kim đồng hồ (chiều tiến);
(2) Xoay từ phải sang trái ngược chiều kim đồng hồ (chiều lùi).
Câu lệnh điều khiển động cơ có thể được mô tả như sau:
Xoay động cơ (chiều, tốc độ)
Trong đó, tham số chiều nhận một trong hai giá trị tiến hoặc lùi, tham số tốc độ nhận một giá trị từ 0 đến 255.
Bảng 9.1. Các lệnh để điều khiển động cơ DC
| Lệnh | Tham số | Mô tả ý nghĩa |
| Xoay động cơ DC M1 (chiều, tốc độ) | chiều (“tiến”, “lùi”)tốc độ (từ 0 đến 255) | Điều khiển động cơ M1 (động cơ trái) chuyển động theo chiều kim đồng hồ (nếu chiều = “tiến”) hoặc ngược lại (nếu chiều = “lùi”). |
| Xoay động cơ DC M2 (chiều, tốc độ) | chiều (“tiến”, “lùi”)tốc độ (từ 0 đến 255) | Điều khiển động cơ tại cổng M2 (động cơ phải). Ý nghĩa tương tự lệnh điều khiển động cơ M1. |
Câu hỏi trang 41 Chuyên đề Tin học 10: Em hãy viết câu lệnh điều khiển robot quay lại 180 độ và đi tiếp.
Trả lời:
Câu lệnh có thể như sau:
Bắt đầu chương trình
Đi thẳng (150)
Đợi 2 giây
Xoay trái (180)
Đợi 0,5 giây
Đi thẳng (150)
Đợi 1.5 giây
Dừng lại
2. Lập trình điều khiển động cơ servo
Hoạt động 2 trang 41 Chuyên đề Tin học 10: Tìm hiểu cách điều khiển động cơ servo
Đọc, thảo luận về câu lệnh điều khiển của động cơ servo và mô hình ứng dụng hai động cơ servo.
Trả lời:
Câu lệnh điều khiển động cơ servo như sau:
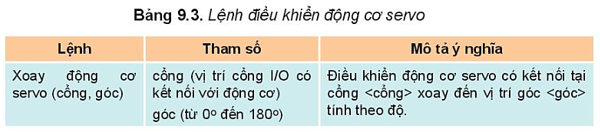
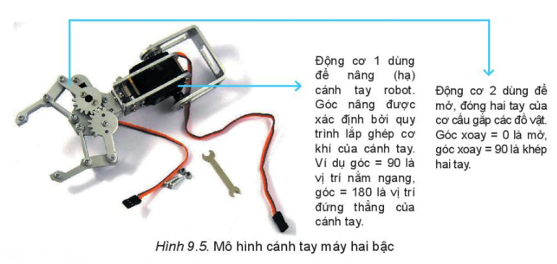
Mô hình ứng dụng hai động cơ servo chính là mô hình cánh tay robot:
Cánh tay robot là một loại thiết bị cơ khí được thiết kế để thực hiện các chức năng tương tự như cánh tay của con người và thường được sử dụng trong các dây chuyền lắp ráp, thay thế các linh kiện tại các nhà máy.
Câu hỏi 1 trang 43 Chuyên đề Tin học 10: Em hãy giải thích ý nghĩa của hai lệnh Đợi 0,5 giây trong chương trình ở Hình 9.6.
Trả lời:
Hai câu lệnh đợi 0.5 giây được thêm vào với mục đích điều khiển robot tạm dừng lại ở một số hoạt động để người sử dụng dễ quan sát hơn. Cụ thể như sau:
- Câu lệnh Đợi 0.5 giây ở vị trí thứ nhất giúp robot tạm ngưng các hoạt động trong 0.5 giây sau khi đóng cơ cấu gắp và chuẩn bị nâng vật lên.
- Câu lệnh Đợi 0.5 giây ở vị trí thứ hai giúp robot tạm ngưng các hoạt động trong 0.5 giây trước khi đóng cơ cấu gắp vật.
Câu hỏi 2 trang 43 Chuyên đề Tin học 10: Em hãy cho biết hai lệnh thiết lập tham số ban đầu của động cơ tại cổng 5 và cổng 6 trong chương trình ở Hình 9.6 có thể thay đổi được vị trí được không.
Trả lời:
Có thể, vì hai lệnh thiết lập vị trí của cánh tay ở góc 90 độ và trạng thái mở của cơ cấu gắp. Không ảnh hưởng đến các hoạt động được lập trình của toàn bộ cánh tay robot 2 bậc.
Luyện tập 1 trang 43 Chuyên đề Tin học 10: Em hãy viết chương trình bằng mã giả lập để điều khiển robot di chuyển theo cạnh của hình vuông cho trước theo chiều kim đồng hồ.
Trả lời:
Chương trình viết bằng Pseudocode giúp điều khiển robot di chuyển theo cạnh của hình vuông cho trước như sau:
Khởi động chương trình
Đi thẳng (150)
Đợi 2 giây
Xoay trái (100)
Đợi 0.5 giây
Đi thẳng (150)
Đợi 2 giây
Xoay trái (100)
Đợi 0.5 giây
Đi thẳng (150)
Đợi 2 giây
Dừng lại
Luyện tập 2 trang 43 Chuyên đề Tin học 10: Em hãy nêu sự khác biệt cơ bản giữa lập trình động cơ DC và động cơ servo.
Trả lời:
Động cơ servo có thể lập trình điều khiển được góc xoay trong khi động cơ DC không lập trình điều khiển được chính xác góc xoay.
Động cơ servo không thể lập trình điều khiển được tốc độ xoay trong khi động cơ DC có tham số để lập trình điều khiển được tốc độ xoay.
Vận dụng 1 trang 43 Chuyên đề Tin học 10: Em hãy viết lại các chương trình điều khiển robot chuyển động được giới thiệu trong bài, sử dụng lệnh điều khiển từng động cơ M1 và M2.
Trả lời:
Ví dụ 1:
Bắt đầu chương trình
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 2 giây
Dừng lại
Ví dụ 2:
Bắt đầu chương trình
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 2 giây
Xoay động cơ DC M1 (tiến, 0)
Xoay động cơ DC M2 (tiến, 100)
Đợi 0.5 giây
Xoay động cơ DC M1 (tiến, 150)
Xoay động cơ DC M2 (tiến, 150)
Đợi 1.5 giây
Dừng lại
Vận dụng 2 trang 43 Chuyên đề Tin học 10: Em hãy tìm hiểu thêm các kiểu kết nối ứng dụng khác của cánh tay robot hai bậc.
Trả lời:
Trong thực tế, cánh tay robot nhiều bậc được ứng dụng để tự động hóa lắp ráp ô tô trong nhà máy thay cho con người. Ngoài ra chúng còn được ứng dụng trong một số công việc như: pha cà phê, cầm nắm trong các robot mô phỏng hình dáng con người…
Xem thêm lời giải bài tập Chuyên đề Tin học lớp 10 Kết nối tri thức với cuộc sống hay, chi tiết khác:
Bài 7: Thực hành: Cài đặt và kết nối robot
Bài 8: Thực hành: Kiểm tra tình trạng hoạt động của robot
Bài 10: Điều khiển robot nhận biết vật cản
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Kết nối tri thức
- Tác giả tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Soạn văn lớp 10 (ngắn nhất) – Kết nối tri thức
- Tóm tắt tác phẩm Ngữ văn lớp 10 - KNTT
- Bố cục tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Văn mẫu lớp 10 – Kết nối tri thức
- Giải Chuyên đề học tập Ngữ văn 10 – Kết nối tri thức
- Giải sgk Toán 10 – Kết nối tri thức
- Giải sbt Toán 10 – Kết nối tri thức
- Giải Chuyên đề Toán 10 – Kết nối tri thức
- Lý thuyết Toán 10 – Kết nối tri thức
- Chuyên đề dạy thêm Toán 10 Kết nối tri thức (2024 có đáp án)
- Giải sgk Tiếng Anh 10 Global Success – Kết nối tri thức
- Giải sbt Tiếng Anh 10 Global Success – Kết nối tri thức
- Ngữ pháp Tiếng Anh 10 Global success
- Bài tập Tiếng Anh 10 Global success theo Unit có đáp án
- Trọn bộ Từ vựng Tiếng Anh 10 Global success đầy đủ nhất
- Giải sgk Vật lí 10 – Kết nối tri thức
- Giải sbt Vật lí 10 – Kết nối tri thức
- Giải Chuyên đề Vật lí 10 – Kết nối tri thức
- Lý thuyết Vật lí 10 – Kết nối tri thức
- Chuyên đề dạy thêm Vật lí 10 cả 3 sách (2024 có đáp án)
- Giải sgk Hóa học 10 – Kết nối tri thức
- Lý thuyết Hóa học 10 – Kết nối tri thức
- Giải sbt Hóa học 10 – Kết nối tri thức
- Giải Chuyên đề Hóa học 10 – Kết nối tri thức
- Chuyên đề dạy thêm Hóa 10 cả 3 sách (2025 có đáp án)
- Giải sgk Sinh học 10 – Kết nối tri thức
- Giải sbt Sinh học 10 – Kết nối tri thức
- Lý thuyết Sinh học 10 – Kết nối tri thức
- Giải Chuyên đề Sinh học 10 – Kết nối tri thức
- Giải sgk Lịch sử 10 – Kết nối tri thức
- Giải sbt Lịch sử 10 – Kết nối tri thức
- Giải Chuyên đề Lịch sử 10 – Kết nối tri thức
- Lý thuyết Lịch sử 10 - Kết nối tri thức
- Giải sgk Địa lí 10 – Kết nối tri thức
- Lý thuyết Địa Lí 10 – Kết nối tri thức
- Giải sbt Địa lí 10 – Kết nối tri thức
- Giải Chuyên đề Địa lí 10 – Kết nối tri thức
- Giải sgk Công nghệ 10 – Kết nối tri thức
- Lý thuyết Công nghệ 10 – Kết nối tri thức
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Kết nối tri thức
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Kết nối tri thức
- Giải Chuyên đề Kinh tế và pháp luật 10 – Kết nối tri thức
- Lý thuyết KTPL 10 – Kết nối tri thức
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Kết nối tri thức
- Lý thuyết Giáo dục quốc phòng 10 – Kết nối tri thức
- Giải sbt Giáo dục quốc phòng 10 – Kết nối tri thức
- Giải sgk Hoạt động trải nghiệm 10 – Kết nối tri thức
- Giải sbt Hoạt động trải nghiệm 10 – Kết nối tri thức
- Giải sgk Giáo dục thể chất 10 – Kết nối tri thức