Chuyên đề Tin học 10 Bài 3 (Kết nối tri thức): Cảm biến và phụ kiện dùng trong robot
Với giải bài tập Chuyên đề Tin học 10 Bài 3: Cảm biến và phụ kiện dùng trong robot sách Kết nối tri thức hay nhất, chi tiết giúp học sinh dễ dàng làm bài tập Chuyên đề học tập Tin học 10 KNTT Bài 3.
Giải bài tập Chuyên đề Tin học 10 Bài 3: Cảm biến và phụ kiện dùng trong robot
Khởi động trang 15 Chuyên đề Tin học 10: Dịch vụ thương mại điện tử hàng đầu thế giới của công ty Amazon đã sử dụng robot để sắp xếp, vận chuyển hàng hóa trong kho (Hình 3.1). Em có biết rằng cách nào hàng trăm con robot có thể di chuyển mà không và chạm vào nhau?
Trả lời:
Để hàng trăm con robot có thể di chuyển mà không và chạm vào nhau thì con robot ấy phải có cảm biến dò đường và cảm biến siêu âm giúp dò đường và phát hiện vật cản.
1. Một số cảm biến thường dùng
Hoạt động 1 trang 15 Chuyên đề Tin học 10: Tìm hiểu về nguyên lý hoạt động cơ bản, cách kết nối với robot của cảm biến dò đường và cảm biến siêu âm.
Trả lời:
Giống nhau giữa cảm biến dò đường và cảm biến siêu âm: hoạt động trên nguyên lý phát sóng và phản xạ sóng.
Khác nhau giữa cảm biến dò đường và cảm biến siêu âm:
* Cảm biến dò đường:
Bộ phận quan trọng nhất trong cảm biến dò đường là mắt hồng ngoại. Mỗi mắt hồng ngoại được cấu tạo gồm một cặp đầu phát/thu tín hiệu hồng ngoại đặt cạnh nhau nhìn về cùng một hướng.
Nguyên tắc dẫn đường của cảm biến dò đường hai mắt đơn giản như sau: Giả sử đường đi được thể hiện là một vạch màu đen (có độ rộng lớn hơn khoảng cách giữa hai mắt) trên nền địa hình màu trắng và robot đang dịch chuyển trên đường. Nếu tín hiệu trả về của cả 2 mắt đều bằng 0, em tiếp tục cho robot di chuyển thẳng dọc theo đường đi. Khi tín hiệu trả về của một trong hai mắt bằng 1, nghĩa là robot bắt đầu di chuyển lệch khỏi đường đi, em cần điều khiển để robot rẽ sang phía mắt có tín hiệu bằng 0. Dựa vào nguyên tắc này em có thể lập trình để dẫn robot di chuyển dọc theo một đường đi được vẽ ra từ trước.
* Cảm biến siêu âm:
Khi được cấp nguồn hoạt động, cảm biến sẽ phát ra một chùm sóng siêu âm liên tục. Khi các chùm sóng này chạm đến bề mặt vật cản sẽ phản xạ ngược lại cảm biến. Lúc này cảm biến sẽ thu lại các chùm sóng và tính toán khoảng cách từ cảm biến đến vật cản dựa trên thời gian phản xạ và vận tốc của sóng.
Câu hỏi 1 trang 17 Chuyên đề Tin học 10: Vì sao cảm biến siêu âm phải đặt phía trước robot tự hành?
Trả lời:
Cảm biến siêu âm phải đặt phía trước robot tự hành vì: cảm biến sẽ phát ra một chùm sóng siêu âm liên tục. Khi các chùm sóng này chạm đến bề mặt vật cản sẽ phản xạ ngược lại cảm biến. Lúc này cảm biến sẽ thu lại các chùm sóng và tính toán khoảng cách từ cảm biến đến vật cản dựa trên thời gian phản xạ và vận tốc của sóng. Nếu lắp ở vị trí khác thì chùm sóng siêu âm phát ra không chính xác, đo khoảng cách từ robot đến vật cản cũng không chính xác.
Trả lời:
Cảm biến siêu âm mBot hoạt động dựa trên nguyên tắc là mắt trái (T) sẽ phát 1 đoạn sóng siêu âm tần số trên 42kHz và mắt phải (R) sẽ thu nhận tần số sóng siêu âm trở lại. Dựa vào thời gian sóng phát ra và quay lại để đo khoảng cách, xác định chướng ngại vật phía trước. Tiếp đến, sau khi xác định được phía trước có chướng ngại vật hay không có thể đặt tiếp các chuỗi lệnh phù hợp cho mBot thực hiện. Trên thân mBot, bộ phận cảm biến siêu âm có hình dạng như dưới đây:

Cảm biến siêu âm thường được ứng dụng phổ biến trong giao thông vận tải để phòng trách va chạm xảy ra, hoặc ngay trong sinh hoạt gia đình cũng được ứng dụng rộng rãi với máy hút bụi tự động, …
Cảm biến siêu âm của mBot được điều khiển thông qua chức năng sense [cảm biến] của APP mBlock.
2. Một số phụ kiện
Hoạt động 2 trang 17 Chuyên đề Tin học 10: Tìm hiểu về cách robot đưa ra thông báo
Trả lời:
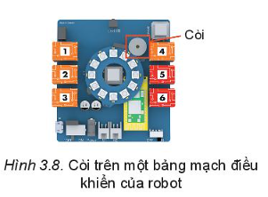
- Còi là một phụ kiện phát ra âm thanh, sử dụng điện áp để chuyển đổi tín hiệu điện thành âm thanh.
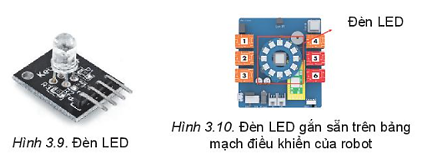
- Đèn LED là cơ cấu chuyển đổi tín hiệu điện thành ánh sáng.

- Màn hình là phương tiện không thể thiếu trong giao tiếp người - máy nói chung.

- Vỉ điều khiển từ xa: là một phụ kiện thường dùng cho robot.

Câu hỏi trang 18 Chuyên đề Tin học 10: Nếu robot được trang bị cảm biến nhiệt độ và độ ẩm không khí thì dữ liệu đo được bởi các cảm biến này có thể được hiển thị ở đâu?
Trả lời:
Nếu robot được trang bị cảm biến nhiệt độ và độ ẩm không khí thì dữ liệu đo được bởi các cảm biến này có thể được hiển thị ở màn hình LCD.
Luyện tập 1 trang 18 Chuyên đề Tin học 10: Để điều khiển robot di chuyển theo một đường đi đã được vạch sẵn thì cần dùng cảm biến hay cơ cấu chấp hành nào? Em có thể chọn nhiều hơn một phương án.
A. Cảm biến siêu âm
B. Cảm biến dò đường
C. Động cơ DC
Trả lời:
Đáp án B và C
Để điều khiển robot di chuyển theo một đường đi đã được vạch sẵn thì cần dùng cảm biến dò đường và động cơ DC.
Luyện tập 2 trang 18 Chuyên đề Tin học 10: Robot sử dụng những phụ kiện tiếp nhận điều khiển nào để chuyển tải các thông tin âm thanh, hình ảnh?
Trả lời:
Robot sử dụng những phụ kiện tiếp nhận điều khiển sau để chuyển tải các thông tin âm thanh, hình ảnh, đó là: còi và màn hình.
Vận dụng 1 trang 18 Chuyên đề Tin học 10: Theo em ngoài cảm biến dò đường và siêu âm để hỗ trợ di chuyển, robot còn có thể sử dụng những cách thức nào khác? Nêu hai cách mà em biết.
Trả lời:
- Có thể dùng vỉ điều khiển từ xa để điều khiển robot di chuyển.
- Có thể kết hợp dùng thêm cảm biến ánh sáng, nhiệt độ để điều chỉnh đường đi.
Vận dụng 2 trang 18 Chuyên đề Tin học 10: Em hãy mô tả chức năng của một vài phụ kiện tiếp nhận điều khiển robot mà em biết.
Trả lời:
- Màn hình là phương tiện không thể thiếu trong giao tiếp người – máy nói chung. Trong robot, màn hình được kết nối riêng biệt thông qua cổng giao tiếp và thường được dùng để hiện thị các thông tin như: nhiệt độ, độ ẩm…hoặc các thông báo ngắn trong quá trình robot hoạt động.

- Đèn LED là cơ cấu chuyển đổi của tín hiệu thành ánh sáng. Đèn LED có nhiều loại như: đèn LED đơn sắc, đèn LED đa sắc. Đèn LED có thể được gắn sẵn trên bảng mạch điều khiển của robot hoặc kết nối rời thông qua các cổng giao tiếp.
Xem thêm lời giải bài tập Chuyên đề Tin học lớp 10 Kết nối tri thức với cuộc sống hay, chi tiết khác:
Bài 1: Cấu tạo chung của robot giáo dục
Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành
Bài 4: Thực hành lắp robot hoàn chỉnh
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Kết nối tri thức
- Tác giả tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Soạn văn lớp 10 (ngắn nhất) – Kết nối tri thức
- Tóm tắt tác phẩm Ngữ văn lớp 10 - KNTT
- Bố cục tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Kết nối tri thức
- Văn mẫu lớp 10 – Kết nối tri thức
- Giải Chuyên đề học tập Ngữ văn 10 – Kết nối tri thức
- Giải sgk Toán 10 – Kết nối tri thức
- Giải sbt Toán 10 – Kết nối tri thức
- Giải Chuyên đề Toán 10 – Kết nối tri thức
- Lý thuyết Toán 10 – Kết nối tri thức
- Chuyên đề dạy thêm Toán 10 Kết nối tri thức (2024 có đáp án)
- Giải sgk Tiếng Anh 10 Global Success – Kết nối tri thức
- Giải sbt Tiếng Anh 10 Global Success – Kết nối tri thức
- Ngữ pháp Tiếng Anh 10 Global success
- Bài tập Tiếng Anh 10 Global success theo Unit có đáp án
- Trọn bộ Từ vựng Tiếng Anh 10 Global success đầy đủ nhất
- Giải sgk Vật lí 10 – Kết nối tri thức
- Giải sbt Vật lí 10 – Kết nối tri thức
- Giải Chuyên đề Vật lí 10 – Kết nối tri thức
- Lý thuyết Vật lí 10 – Kết nối tri thức
- Chuyên đề dạy thêm Vật lí 10 cả 3 sách (2024 có đáp án)
- Giải sgk Hóa học 10 – Kết nối tri thức
- Lý thuyết Hóa học 10 – Kết nối tri thức
- Giải sbt Hóa học 10 – Kết nối tri thức
- Giải Chuyên đề Hóa học 10 – Kết nối tri thức
- Chuyên đề dạy thêm Hóa 10 cả 3 sách (2024 có đáp án)
- Giải sgk Sinh học 10 – Kết nối tri thức
- Giải sbt Sinh học 10 – Kết nối tri thức
- Lý thuyết Sinh học 10 – Kết nối tri thức
- Giải Chuyên đề Sinh học 10 – Kết nối tri thức
- Giải sgk Lịch sử 10 – Kết nối tri thức
- Giải sbt Lịch sử 10 – Kết nối tri thức
- Giải Chuyên đề Lịch sử 10 – Kết nối tri thức
- Lý thuyết Lịch sử 10 - Kết nối tri thức
- Giải sgk Địa lí 10 – Kết nối tri thức
- Lý thuyết Địa Lí 10 – Kết nối tri thức
- Giải sbt Địa lí 10 – Kết nối tri thức
- Giải Chuyên đề Địa lí 10 – Kết nối tri thức
- Giải sgk Công nghệ 10 – Kết nối tri thức
- Lý thuyết Công nghệ 10 – Kết nối tri thức
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Kết nối tri thức
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Kết nối tri thức
- Giải Chuyên đề Kinh tế và pháp luật 10 – Kết nối tri thức
- Lý thuyết KTPL 10 – Kết nối tri thức
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Kết nối tri thức
- Lý thuyết Giáo dục quốc phòng 10 – Kết nối tri thức
- Giải sbt Giáo dục quốc phòng 10 – Kết nối tri thức
- Giải sgk Hoạt động trải nghiệm 10 – Kết nối tri thức
- Giải sbt Hoạt động trải nghiệm 10 – Kết nối tri thức
- Giải sgk Giáo dục thể chất 10 – Kết nối tri thức