Giải SBT Tin học 10 trang 48 Cánh diều
Với Giải SBT Tin học 10 trang 48 trong Bài 16: Kiểm thử và gỡ lỗi chương trình sách Tin học lớp 10 Cánh diều hay nhất, chi tiết sẽ giúp học sinh dễ dàng trả lời các câu hỏi & làm bài tập Tin học 10 trang 48.
Giải SBT Tin học 10 trang 48 Cánh diều
Câu F84 trang 48 SBT Tin 10: Hoàn thiện chương trình
Xét bài toán: Cho đa giác n đỉnh, đỉnh thứ i có toạ độ nguyên (xi, yi). với i = 1, 2, ..., n. Hãy tính và đưa ra độ dài cạnh lớn nhất của đa giác. Độ dài của đoạn thẳng với các điểm đầu, cuối lần lượt có toạ độ (u, v) và (p, q) được tính theo công thức √(u−v)2+(p−q)2.
Dữ liệu: Nhập vào từ thiết bị vào chuẩn:
- - Dòng thứ nhất chứa số nguyên đương i.
- - Dòng thứ i trong n dòng sau chứa hai số nguyên xi, và yi ghi cách nhau một dấu cách. Các đỉnh của đa giác được liệt kê theo một chiều nào đó.
Kết quả: Đưa ra thiết bị ra chuẩn một số thực là độ dài lớn nhất tìm được với độ chính xác đến 2 chữ số sau dấu phẩy thập phân.
Chương trình sau thực hiện bài toán trên. Em hãy cho biết chương trình chưa hoàn thiện ở điểm nào và chỉ ra một cách hoàn thiện chương trình.
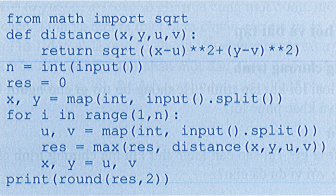
Trả lời:
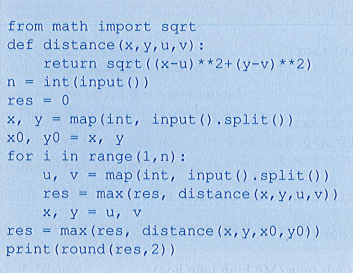
Chương trình chưa xét độ dài cạnh nối điểm cuối dùng trong danh sách với điểm đầu tiên. Một trong số cách hoàn thiện chương trình là:
- Lưu lại toạ độ điểm đầu tiên.
- Sau khi kết thúc chu trình:
+ Tính độ dài cạnh nối điểm cuối với điểm đầu.
+ Cập nhật kết quả.
Tham khảo chương trình sau:
Câu F85 trang 48 SBT Tin 10: Sửa lỗi cho chương trình
Xét bài toán: Robot hạ cánh xuống vùng cần thăm dò ở trạng thái quay mặt về hướng Đông.
Có ba lệnh điều khiển chuyển động: L - quay sang trái và tiến một bước, R - quay sang phải và tiến một bước, C – tiến một bước theo hướng đang đi. Các lệnh robot nhận được trong ngày được lưu trữ dưới dạng xâu Trace chỉ chứa các kí tự từ tập {L, R, C}. Hình bên minh hoạ một số chuyển động của robot. Để chuẩn bị cho trạng thái ngủ qua đêm người ta cần biết cuối ngày robot đang quay mặt nhìn về hướng nào.

Hãy xác định hướng quay mặt của robot và đưa ra kết quả dưới dạng một kí tự từ tập {E, N, W, S}, trong đó E là hướng Đông, N là hướng Bắc, W là hướng Tây và S là hướng Nam.
Dữ liệu: Gồm một dòng chứa xâu Trace được nhập vảo từ thiết bị vào chuẩn.
Kết quả: Đưa ra thiết bị ra chuẩn một kí tự xác định hướng nhìn của robot.
Gợi ý thuật toán:
- Xét hướng ban đầu của robot: Đông (E).
- Sau một lần rẽ trái (lệnh L) robot chuyển sang hướng Bắc (N).
- Sau hai lần rẽ trái (lệnh L) robot chuyển sang hướng Tây (W).
- Sau ba lần rẽ trái (lệnh L) robot chuyển sang hướng Nam (S).
- Sau bốn lần rẽ trái (lệnh L) robot quay trở về hướng Đông (E).
- Một lần rẽ phải (lệnh R) tương đương với ba lần rẽ trái (không tính chuyển động).
- Các lệnh C - không thay đổi hướng đi.
Như vậy tính số lần rẽ theo lệnh L ta dễ dàng xác định hướng nhìn của robot ở cuối hành trình đã cho.
Chương trình ở hình sau thực hiện bài toán trên. Chương trình không có lỗi cú pháp nhưng khi thực hiện cho kết quả sai. Em hãy tìm chỗ sai và sửa lại để có chương trình đúng.
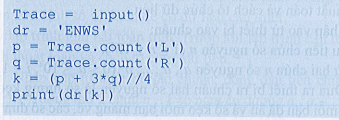
Trả lời:
Cần thay câu lệnh k = (p+3*q) //4 bằng lệnh k = (p+3*q) % 4.
Xem thêm các bài giải sách bài tập Tin học 10 bộ sách Cánh diều hay, chi tiết khác:
Câu F81 trang 47 SBT Tin 10: Lỗi trong chương trình: Có mấy loại lỗi khi lập trình? Hệ thống hỗ trợ gì cho người lập trình trong việc tìm và khắc phục lỗi...
Câu F82 trang 47 SBT Tin 10: Kiểm thử: Kiểm thử là gì? Tại sao cần kiểm thử khi mà chương trình chạy đưa ra kết quả đúng với ví dụ đã cho...
Câu F83 trang 47 SBT Tin 10: Tìm lỗi: Chương trình sau thực hiện nhập từ thiết bị vào chuẩn hai dòng...
Câu F84 trang 48 SBT Tin 10: Hoàn thiện chương trình: Xét bài toán: Cho đa giác n đỉnh, đỉnh thứ i có toạ độ nguyên (xi, yi). với i = 1, 2, ..., n...
Câu F85 trang 48 SBT Tin 10: Sửa lỗi cho chương trình: Xét bài toán: Robot hạ cánh xuống vùng cần thăm dò ở trạng thái quay mặt về hướng Đông...
Xem thêm lời giải sách bài tập Tin học lớp 10 Cánh diều hay, chi tiết khác:
Xem thêm các chương trình khác:
- Soạn văn lớp 10 (hay nhất) – Cánh Diều
- Tác giả tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Tóm tắt tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Bố cục tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Nội dung chính tác phẩm Ngữ văn lớp 10 – Cánh Diều
- Soạn văn lớp 10 (ngắn nhất) – Cánh Diều
- Giải sbt Ngữ văn lớp 10 – Cánh Diều
- Văn mẫu lớp 10 – Cánh Diều
- Giải Chuyên đề học tập Ngữ văn 10 – Cánh diều
- Giải sgk Toán 10 – Cánh Diều
- Giải Chuyên đề Toán 10 – Cánh Diều
- Lý thuyết Toán 10 – Cánh Diều
- Giải sbt Toán 10 – Cánh Diều
- Chuyên đề dạy thêm Toán 10 Cánh diều (2024 có đáp án)
- Giải sgk Tiếng Anh 10 – Explore new worlds
- Giải sgk Tiếng Anh 10 – ilearn Smart World
- Trọn bộ Từ vựng Tiếng Anh 10 ilearn Smart World đầy đủ nhất
- Ngữ pháp Tiếng Anh 10 i-learn Smart World
- Giải sbt Tiếng Anh 10 - iLearn Smart World
- Giải sgk Vật lí 10 – Cánh Diều
- Giải sbt Vật lí 10 – Cánh Diều
- Lý thuyết Vật lí 10 – Cánh Diều
- Giải Chuyên đề Vật lí 10 – Cánh Diều
- Giải sgk Hóa học 10 – Cánh Diều
- Lý thuyết Hóa học 10 – Cánh Diều
- Giải sbt Hóa học 10 – Cánh Diều
- Giải Chuyên đề Hóa học 10 – Cánh Diều
- Giải sgk Sinh học 10 – Cánh Diều
- Giải sbt Sinh học 10 – Cánh Diều
- Lý thuyết Sinh học 10 – Cánh Diều
- Giải Chuyên đề Sinh học 10 – Cánh diều
- Giải sgk Lịch sử 10 – Cánh Diều
- Giải sbt Lịch sử 10 – Cánh Diều
- Giải Chuyên đề Lịch sử 10 – Cánh Diều
- Lý thuyết Lịch sử 10 – Cánh diều
- Giải sgk Địa lí 10 – Cánh Diều
- Lý thuyết Địa Lí 10 – Cánh Diều
- Giải sbt Địa lí 10 – Cánh Diều
- Giải Chuyên đề Địa lí 10 – Cánh Diều
- Lý thuyết Công nghệ 10 – Cánh Diều
- Giải sgk Công nghệ 10 – Cánh Diều
- Giải sgk Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải sbt Giáo dục Kinh tế và Pháp luật 10 – Cánh Diều
- Giải Chuyên đề Kinh tế pháp luật 10 – Cánh diều
- Lý thuyết KTPL 10 – Cánh diều
- Lý thuyết Giáo dục quốc phòng 10 – Cánh Diều
- Giải sgk Giáo dục quốc phòng - an ninh 10 – Cánh diều
- Giải sbt Giáo dục quốc phòng - an ninh 10 – Cánh Diều
- Giải sgk Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sbt Hoạt động trải nghiệm 10 – Cánh Diều
- Giải sgk Giáo dục thể chất 10 – Cánh Diều