Câu hỏi:
15/07/2024 136
Lập trình dẫn đường với cảm biến dò đường hai mắt.
Đọc, thảo luận cách thức dẫn đường tự động cho robot với cảm biến dò đường hai mắt.
Lập trình dẫn đường với cảm biến dò đường hai mắt.
Đọc, thảo luận cách thức dẫn đường tự động cho robot với cảm biến dò đường hai mắt.
Trả lời:
 Giải bởi Vietjack
Giải bởi Vietjack
Cảm biến dò đường dùng để phân biệt bề mặt sáng hay tối, vì thế đường mà cảm biến đi qua cần phải tuân thủ các nguyên tắc sau:
- Độ rộng của đường phải rộng khoảng cách giữa hai mắt cạnh nhau của cảm biến.
- Đường phải có màu tương phản với phần xung quanh của đường, ví dụ đường màu đen thì xung quanh là màu trắng và ngược lại. Do vậy, nên tránh điều khiển dẫn đường cho robot dưới trời nắng chói.
Tương ứng với hai mắt của cảm biến sẽ có 4 trường hợp cần xử lý khi lập trình.
Bảng 11.2. Các trường hợp của cảm biến dò đường hai mắt
Trường hợp
Mắt trái
Mắt phải
Xử lí dò đường
Hai mắt tín hiệu cùng nằm ở vùng tối.
0
0
Robot cần đi thẳng
Mắt trái nằm trên mặt tối, mắt phải nằm trên vùng sáng.
0
1
Robot cần rẽ trái
Mắt trái nằm trên vùng sáng, mắt phải nằm trên vùng tối.
1
0
Robot cần rẽ phải
Cả hai mắt đều nằm trên vùng sáng.
1
1
Đối với từng trường hợp đường đi cụ thể có thể xử lí một trong các động tác sau: xoay trái, xoay phải, đi lùi để về đường di chuyển hoặc dừng lại để dừng tại điểm kết thúc.
Cảm biến dò đường dùng để phân biệt bề mặt sáng hay tối, vì thế đường mà cảm biến đi qua cần phải tuân thủ các nguyên tắc sau:
- Độ rộng của đường phải rộng khoảng cách giữa hai mắt cạnh nhau của cảm biến.
- Đường phải có màu tương phản với phần xung quanh của đường, ví dụ đường màu đen thì xung quanh là màu trắng và ngược lại. Do vậy, nên tránh điều khiển dẫn đường cho robot dưới trời nắng chói.
Tương ứng với hai mắt của cảm biến sẽ có 4 trường hợp cần xử lý khi lập trình.
Bảng 11.2. Các trường hợp của cảm biến dò đường hai mắt
|
Trường hợp |
Mắt trái |
Mắt phải |
Xử lí dò đường |
|
Hai mắt tín hiệu cùng nằm ở vùng tối. |
0 |
0 |
Robot cần đi thẳng |
|
Mắt trái nằm trên mặt tối, mắt phải nằm trên vùng sáng. |
0 |
1 |
Robot cần rẽ trái |
|
Mắt trái nằm trên vùng sáng, mắt phải nằm trên vùng tối. |
1 |
0 |
Robot cần rẽ phải |
|
Cả hai mắt đều nằm trên vùng sáng. |
1 |
1 |
Đối với từng trường hợp đường đi cụ thể có thể xử lí một trong các động tác sau: xoay trái, xoay phải, đi lùi để về đường di chuyển hoặc dừng lại để dừng tại điểm kết thúc. |
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Câu 1:
Em hãy tìm hiểu thêm thông tin về một số robot hiện nay ở Việt Nam trên Internet.
Em hãy tìm hiểu thêm thông tin về một số robot hiện nay ở Việt Nam trên Internet.
Câu 2:
Dẫn đường với cảm biến dò đường 4 mắt.
Đọc, thảo luận nhóm về câu lệnh lập trình cảm biến đò đường bốn mắt và cách thức dẫn đường cho robot với cảm biến bốn mắt.
Dẫn đường với cảm biến dò đường 4 mắt.
Đọc, thảo luận nhóm về câu lệnh lập trình cảm biến đò đường bốn mắt và cách thức dẫn đường cho robot với cảm biến bốn mắt.
Câu 3:
Em hãy viết đoạn chương trình robot dò đường trong trường hợp tổ hợp tín hiệu từ cảm biến dò đường là (0,0,0,1) gặp ngã ba robot rẽ trái.
Em hãy viết đoạn chương trình robot dò đường trong trường hợp tổ hợp tín hiệu từ cảm biến dò đường là (0,0,0,1) gặp ngã ba robot rẽ trái.
Câu 4:
Em hãy viết chương trình điều khiển robot dò đường, đi từ điểm A đến vị trí B thì rẽ trái, đi đến C thì dừng lại (Hình 11.6). Robot có trang bị cảm biến dò đường bốn mắt.
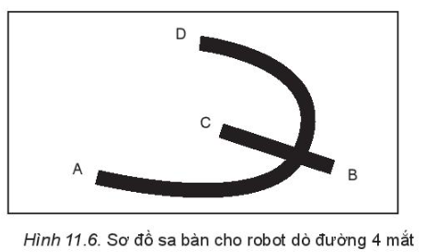
Em hãy viết chương trình điều khiển robot dò đường, đi từ điểm A đến vị trí B thì rẽ trái, đi đến C thì dừng lại (Hình 11.6). Robot có trang bị cảm biến dò đường bốn mắt.
Câu 5:
Em hãy viết chương trình sử dụng câu lệnh cảm biến dò đường hai mắt cho trường hợp: khi robot đi hết phần đường màu đen và gặp phần đường màu trắng thì quay đầu lại.
Em hãy viết chương trình sử dụng câu lệnh cảm biến dò đường hai mắt cho trường hợp: khi robot đi hết phần đường màu đen và gặp phần đường màu trắng thì quay đầu lại.
Câu 6:
Theo em làm thế nào để robot có thể tự di chuyển đúng đường đi đã vạch sẵn?
Theo em làm thế nào để robot có thể tự di chuyển đúng đường đi đã vạch sẵn?
Câu 7:
Xác định tín hiệu của mắt trong cảm biến dò đường.
Đọc, thảo luận về nguyên tắc hoạt động và câu lệnh xác định tín hiệu của mắt trong cảm biến dò đường.
Xác định tín hiệu của mắt trong cảm biến dò đường.
Đọc, thảo luận về nguyên tắc hoạt động và câu lệnh xác định tín hiệu của mắt trong cảm biến dò đường.
Câu 8:
Em hãy viết chương trình điều khiển robot đi từ vị trí A đến vị trí B (trong sa bàn ở Hình 11.4) thì dừng lại.
Em hãy viết chương trình điều khiển robot đi từ vị trí A đến vị trí B (trong sa bàn ở Hình 11.4) thì dừng lại.
Câu 9:
Vì sao cảm biến dò đường thường được lắp ghép với robot ở dưới gầm của robot tự hành, ngay sát phía trước?
Vì sao cảm biến dò đường thường được lắp ghép với robot ở dưới gầm của robot tự hành, ngay sát phía trước?
Câu 10:
Em hãy giải thích ý nghĩa của tổ hợp tín hiệu từ cảm biến dò đường 4 mắt trong các trường hợp sau:
a) (0, 1, 1, 1)
b) (1, 1, 1, 0)
Em hãy giải thích ý nghĩa của tổ hợp tín hiệu từ cảm biến dò đường 4 mắt trong các trường hợp sau:
a) (0, 1, 1, 1)
b) (1, 1, 1, 0)
Câu 11:
Em hãy tìm cách thay đổi các câu lệnh của chương trình dò đường ở Mục 2 sao cho robot vẫn di chuyển đúng như chương trình hiện có.
Em hãy tìm cách thay đổi các câu lệnh của chương trình dò đường ở Mục 2 sao cho robot vẫn di chuyển đúng như chương trình hiện có.